GPS関連の話題を掲載していきます。
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
GPSを利用するためには、GPS衛星からの電波をキャッチできる、見晴らしのいい遮蔽されていないことが条件です。したがって、通常、トンネルの中では利用できません。しかしながら、カーナビは車速パルスや、ジャイロセンサーといった、付加情報を利用して、トンネルの中でも問題なく走行ポイントを示すことができます。
というわけで、私も、GPSを利用せず、例えば、トンネルの中での車の動きを示せないかと考え、3軸加速度センサー(KXM52-1050)+マイコン(H8 3069F)を利用して実験してみることにしました。といっても、現実的にこれだけではどうすることもできないので、せめてカーブだけでも軌跡を追えないかと試みるものです。
まず、実際に機器やソフトを組む前に、どうすればカーブ時の軌跡を追えるか考えてみました。
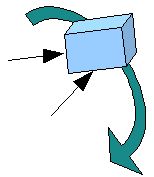
単純に考えれば、上図のようにカーブする際、内側から外に対する加速度、前面に減速による加速度が発生します。
ここで、3軸加速度センサーはx,y,z方向の加速度が検出できるようになっており簡単化のため、x軸方向(前),y軸方向(横)のみ利用することとします。ここで注意せねばならないのが重力加速度です。加速度センサーは何も動かさなくても、例えば、チップを平行においていたとしてz軸方向に1Gの重力加速度を検出します。つまり、先ほどの図でいくとカーブ時に車体が傾きますので、y軸において、内側から外に対する加速度とは逆に、車体の傾き(ロール角)分、小さい、重力加速度が外から内に発生します。よって、どの程度影響するかも考慮が必要と思われます。これはx軸についても言えます。
ひとまず、重力加速度の影響は小さいとここでは考えます。この時、軌跡を描くためにはある特定の時間においての距離が必要になります。しかしながら、初速がわからないと、ここではどうすることもできないので、初速はGPSより得たものを利用することとします。
さてここで、トンネルに入るまえの速度を20km/hとすると、約5.5m/sとなります。ここで、もしx軸方法の加速度が0であれば、5.5m/sのままですが、0以外であれば、5.5m/sより早くなったか遅くなったかということがわかります。
しかしながら、仮に、トンネルに入ってから1秒後の加速度センサーのx軸方向が+1m/(s^2)だとしても、端的に6.5m/sで1秒間動いたわけではなく、1秒間で、5.5m/sから6.5m/sに推移したわけですから、トンネルに入ってからの距離を求めるには、(5.5 + 1)*1では物足りないわけです。
とはいいつつ、私の能力ではまともにこれを解決することはできないので、センサーからの測定値を取得する間隔を狭めて、その間隔の速度は一定であるとします。例えば、先ほどの例でいけば、この間隔を0.2秒として、(5.5 + 1)*0.2としてしまうわけです。
尚、y軸方向の初速は0と仮定します。
この考え方でいけば、x軸方向の推移とy軸方向の推移から、方向と距離がある程度推測できるはず・・です。
しかしながら、現実的には緩やかなカーブであったり、坂もあったりと、なかなか上手くいかないものです。
次はいよいよ、実験用機器とソフトを作ってみます。
というわけで、私も、GPSを利用せず、例えば、トンネルの中での車の動きを示せないかと考え、3軸加速度センサー(KXM52-1050)+マイコン(H8 3069F)を利用して実験してみることにしました。といっても、現実的にこれだけではどうすることもできないので、せめてカーブだけでも軌跡を追えないかと試みるものです。
まず、実際に機器やソフトを組む前に、どうすればカーブ時の軌跡を追えるか考えてみました。
単純に考えれば、上図のようにカーブする際、内側から外に対する加速度、前面に減速による加速度が発生します。
ここで、3軸加速度センサーはx,y,z方向の加速度が検出できるようになっており簡単化のため、x軸方向(前),y軸方向(横)のみ利用することとします。ここで注意せねばならないのが重力加速度です。加速度センサーは何も動かさなくても、例えば、チップを平行においていたとしてz軸方向に1Gの重力加速度を検出します。つまり、先ほどの図でいくとカーブ時に車体が傾きますので、y軸において、内側から外に対する加速度とは逆に、車体の傾き(ロール角)分、小さい、重力加速度が外から内に発生します。よって、どの程度影響するかも考慮が必要と思われます。これはx軸についても言えます。
ひとまず、重力加速度の影響は小さいとここでは考えます。この時、軌跡を描くためにはある特定の時間においての距離が必要になります。しかしながら、初速がわからないと、ここではどうすることもできないので、初速はGPSより得たものを利用することとします。
さてここで、トンネルに入るまえの速度を20km/hとすると、約5.5m/sとなります。ここで、もしx軸方法の加速度が0であれば、5.5m/sのままですが、0以外であれば、5.5m/sより早くなったか遅くなったかということがわかります。
しかしながら、仮に、トンネルに入ってから1秒後の加速度センサーのx軸方向が+1m/(s^2)だとしても、端的に6.5m/sで1秒間動いたわけではなく、1秒間で、5.5m/sから6.5m/sに推移したわけですから、トンネルに入ってからの距離を求めるには、(5.5 + 1)*1では物足りないわけです。
とはいいつつ、私の能力ではまともにこれを解決することはできないので、センサーからの測定値を取得する間隔を狭めて、その間隔の速度は一定であるとします。例えば、先ほどの例でいけば、この間隔を0.2秒として、(5.5 + 1)*0.2としてしまうわけです。
尚、y軸方向の初速は0と仮定します。
この考え方でいけば、x軸方向の推移とy軸方向の推移から、方向と距離がある程度推測できるはず・・です。
しかしながら、現実的には緩やかなカーブであったり、坂もあったりと、なかなか上手くいかないものです。
次はいよいよ、実験用機器とソフトを作ってみます。
 [1回]
[1回]
PR
この記事にコメントする
カレンダー
| 01 | 2026/02 | 03 |
| S | M | T | W | T | F | S |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
カテゴリー
フリーエリア
最新コメント
最新記事
(01/29)
(01/06)
(11/23)
(11/21)
(10/10)
(10/10)
(09/12)
(08/04)
(08/03)
(07/31)
最新トラックバック
プロフィール
HN:
Slit
性別:
非公開
バーコード
ブログ内検索
最古記事
(05/12)
(05/13)
(05/14)
(05/14)
(05/14)
(05/16)
(05/16)
(05/18)
(05/18)
(05/19)
アクセス解析